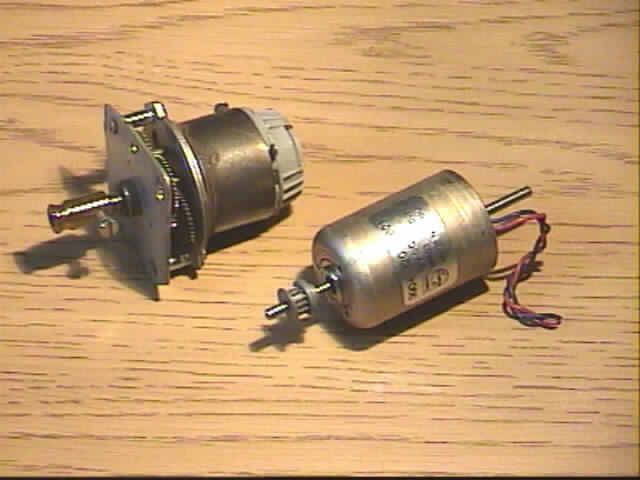
Dies sind zwei Gleichstrommotore aus meiner "langjährigen Sammlung". Interessant ist der linke Motor, da er schon ein Untersetzungsgetriebe hat. Diesen habe ich in einem Spielzeug gefunden und er ist erstaunlich robust.
Erstmal was über Elektromotore:
Schon öfter habe ich auf den diversen Foren festgestellt, daß
einiges an Unklarheiten im Zusammenhang mit den verschiedenen Arten des
Montierungs-Antriebs bestehen. Da ich in der Vergangenheit schon einige
male mit solchen Dingen beruflich zu tun hatte, habe ich vor einiger Zeit
mein bescheidenes Wissen mal zusammen gekratzt und in einen Text gegossen.
Da dieser Text nun schon mal existiert, kann ich ihn auch gleich ins Netz
stellen und ein paar Bilder hinzufügen. Vielleicht kann er dem Ein
oder Anderen bei einem Probelm helfen.
Der ungeregelte Gleichstrommotor.
Dieses Antriebskonzept stellt die elektrisch einfachste Variante dar.
Ein Gleichstrommotor wird mit einer möglichst konstanten Spannung
(Voltzahl) betrieben. Da die Drehzahl beim Gleichstrommotor in erster Linie
von der Betriebsspannung abhängt, kann man auf diese Weise einfach
eine relativ konstante Bewegung erzeugen (es kann aber keine beliebig geringe
Geschwindigkeit durch verringern der Betriebsspannung realisiert werden).
Aber auch die mechanische Belastung hat einen Einfluß auf die Drehgeschwindigkeit.
Deshalb ist diese Antriebsvariante hauptsächlich für die visuelle
Beobachtung geeignet.
Wenn man sich nun überlegt, mit welch geringer Geschwindigkeit
die Rektaszensions-Achse dreht, dann wird für den Praktiker ein mechanisches
Problem deutlich. Es muß eine extrem starke Untersetzung realisiert
werden ohne dabei zu viel mechanisches Spiel (Reaktionsverzögerung
bei Wechsel der Drehrichtung) einzubauen.
Dies sind zwei Gleichstrommotore aus meiner "langjährigen Sammlung".
Interessant ist der linke Motor, da er schon ein Untersetzungsgetriebe
hat. Diesen habe ich in einem Spielzeug gefunden und er ist erstaunlich
robust.
Der Schrittmotor.
Bei käuflichen Telskopen und Montierungen liest man oft, daß die Geräte einen Schrittmotor-Antrieb besitzen. Was aber ist eigentlich ein Schrittmotor ? Das ist eigentlich gar nicht so schwer zu verstehen und soll deshalb hier kurz erklärt werden.
Wir stellen uns folgenden Versuch vor, oder führen ihn evtl. gleich
durch:
Man legt einen Stabmagneten so neben einen Kompaß, daß
einer seiner Pole zum Kompaß hin zeigt. Die Kompaßnadel wird
sich zum Magneten hin ausrichten. Schiebt man nun den Magneten ein Stück
um den Kompaß herum, so folgt die Nadel dieser Bewegung. Dies kann
man rund um den Kompaß fortsetzen und die Nadel wird dieser Bewegung
immer folgen. Das liegt am Magnetfeld, dessen Richtung zum Magneten hin
zeigt und nach dem sich die Nadel ausrichtet. Ersetzt man nun den Dauermagneten
durch mehrere Elektromagnete die um den Kompaß herum angeordnet sind,
so kann man durch geeignetes Ein- und Ausschalten das Magnetfeld von einem
zum anderen Magneten wandern lassen (wie durch das Verschieben des Dauermagneten).
Die Nadel wird auch jetzt dem wandernden Magnetfeld folgen. Damit haben
wir schon einen einfachen Schrittmotor gebaut.
Einen wesentlichen Vorteil des Schrittmotors können wir jetzt
schon erkennen:
Er folgt auch bei langsamer Drehzahl immer genau dem Magnetfeld und
damit der Geschwindigkeit, die von der Steuerung vorgegeben wird (solange
die Belastung nicht zu groß wird). Aus diesem Grund sind diese Motore
für unsere Zwecke so gut einsetzbar.
Die Wicklungen der Elektromagnete im Schrittmotor nennt man auch Stränge und diese werden von der Steuerung automatisch in der richtigen Reihenfolge und mit der richtigen Geschwindigkeit nicht nur ein-/ und ausgeschaltet, sondern in der Stromrichtung umgepolt. Dieses Umpolen bringt uns zu einem wichtigen Unterscheidungsmerkmal zwischen zwei Gruppen von Schrittmotoren, den Bipolar- und den Unipolar-Schrittmotoren. Beim Unipolar-Schrittmotor wird das Umpolen dadurch realisiert, dass die Wicklung in der Mitte eine Anzapfung hat die auf festes Potential gelegt ist, nehmen wir hier mal an auf Plus. Nun kann man die Magnetfeld-Richtung dadurch ändern, daß man einmal das eine und andernfalls das andere Ende der Wicklung auf Minus legt. Dabei wird nur immer eine Hälfte der Wicklung vom Strom durchflossen, was aber bei richtiger Dimensionierung der Wicklung kein Nachteil ist. Für diese Art der Steuerung benötigt der Motortreiber jeweils zwei Transistoren pro Wicklung (Strang). Beim Bipolar- Schrittmotor wird das Umpolen anders realisiert. Bei diesen Motoren fehlt die Anzapfung in Spulenmitte und deshalb müssen an jedem Ende der Wicklung sowohl ein Transistor nach Plus als auch einer nach Minus liegen (deshalb bipolar). Es sind also vier Transistoren pro Wicklung nötig. Wenn am einen Ende der Transistor nach Plus durchgeschaltet ist, so muss am anderen Ende der Transistor nach Minus durchgeschaltet werden beziehungsweise umgekehrt. Diese Transistor- Anordnung nennt man auch Brücken-Endstufe. Aus diesen Zusammenhängen kann man ersehen, daß man zwar einen Unipolar-Schrittmotor mit einer Bipolar- Steuerung betreiben kann indem man die Anzapfungen ignoriert, der umgekehrte Fall aber nicht möglich ist.
Ein Nachteil des Schrittmotors ist, daß er auch im Stillstand
Strom verbraucht (z.B. beim Deklinations-Antrieb). Dieser Stillstandsstrom
hält ein definiertes Magnetfeld aufrecht, welches für das Haltemoment
verantwortlich ist. Manche Steuerungen senken im Stillstand den Motorstrom
ab um Batterieladung zu sparen.
Ein anderer Nachteil ist die nicht sehr hohe Maximalgeschwindigkeit.
Bei einfachen Steuerungen wird der Motor im Schnellgang direkt mit einer
höheren Taktrate angesteuert. Dies funktioniert aber nur für
eine begrezte Geschwindigkeit, da der Motor ansonsten durch die Massen
im System Schritte überschlägt und im Extremfall einfach unter
Abgabe unangenehmer Geräusche stehen bleibt. Diese Geschwindigkeitsgrenze
kann man aber deutlich nach oben schieben, in dem man den Motor nicht plötzlich
mit der höheren Taktrate ansteuert, sondern den Übergang kontinuierlich
gestaltet. Wegen des langsam ansteigenden Geschwindigkeits-Profils nennt
man dies dann auch Rampen-Betrieb. Erhöht man jetzt die Taktrate
weiter, so Schlägt ein anderer Effekt zu: Die Induktivität der
Motorwicklungen. Diese Induktivität führt dazu, daß bei
höherer Taktfrequenz immer weniger Strom durch die Wicklungen fließt
und damit auch das Drehmoment abnimmt. Steuerungen, die auch das Letzte
aus einem Schrittmotor rauskitzeln, erhöhen deshalb bei höheren
Geschwindigkeiten die Betriebsspannung des Motors.
Was jetzt noch fehlt ist die Erklärung von Voll-, Halb-
und Mikroschritt-Betrieb. Erinnern wir uns dazu an den oben beschriebenen
Versuch:
Wenn wir nacheinander den nächsten E-Magnet ein- und den vorherigen
Magnet ausschalten, dann folgt die Kompassnadel dem Magnetfeld in ganzen
Schritten (jeweils Abstand der Magnete), d.h. also Vollschritt-Betrieb.
Läßt man aber beim Einschalten des nächsten Magneten
den Vorherigen eingeschaltet, so stellt sich die Nadel in die Mitte zwischen
die Magnete, sie macht also einen halben Schritt. Später, beim Ausschalten
des vorherigen Magneten, macht sie dann den zweiten halben Schritt auf
die nächste ganze Position. Es ist also möglich durch geschicktes
Ein- und Ausschalten die Winkelauflösung eines Schrittmotors zu verdoppeln,
eben im Halbschritt-Betrieb.
Im Mikroschritt-Betrieb wird dieses Prinzip nun auf die Spitze getrieben.
Beim umschalten auf den nächsten Magneten wird der vorherige langsam
ausgeschaltet wärend der nächste langsam eingeschaltet wird.
Die Nadel durchläuft somit kontinuierlich alle Zwischenpositionen.
Eigentlich hat ein Schrittmotor im Mikroschritt-Betrieb seinen Namen also
garnicht verdient :-)
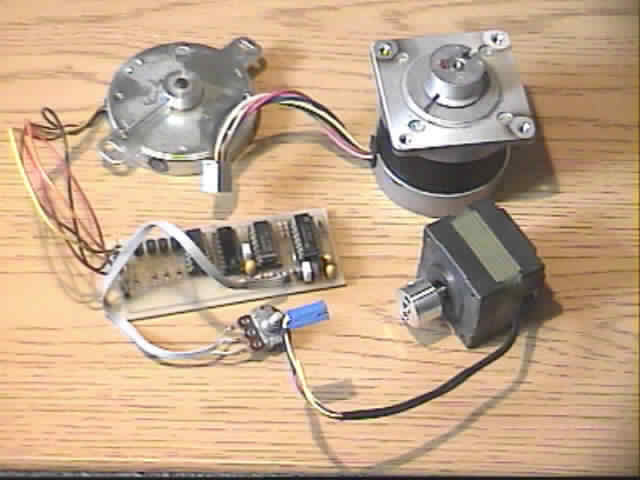
Hier sind verschiedene Schrittmotore zu sehen.
Unten rechts: Schreib- Lesekopfantrieb aus einem 5,25" Diskettenlaufwerk
Oben rechts: Druckkopfantrieb aus einem Nadeldrucker. Dies ist schon
ein kräftiger Brummer, braucht aber auch einiges an Strangstrom.
Oben links : Aus der Restpostenliste von Conrad-Elektronik.
Die dazugehörige Elektronik stellt schon einen vollwertigen Ra-Antrieb
dar.
Der Synchronmotor.
Früher wurden oft Synchronmotoren für die Teleskop- Nachführung
eingesetzt. Diese hatten den Vorteil, daß sie ohne aufwendige elektronische
Steuerung eine konstante Drehzahl lieferten welche durch die Frequenz des
Wechselstromnetzes bestimmt wurde. Hier sieht man aber auch gleich die
Nachteile dieses Motortyps:
Die Motoren wurden mit Netzspannung betrieben, was besonders bei Feuchtigkeit
(Tau) ein nicht zu unterschätzendes Sicherheitsrisiko darstellt. Weil
immer eine Netz- Steckdose in Reichweite sein mußte konnte von Mobilität
keine Rede sein. Da die Motordrehzahl von der Netzfrequenz abhing war nur
eine feste Nachführgeschwindigkeit realisierbar (es ist zwar mit viel
Aufwand auch möglich elektronische Steuerungen zu realisieren, aber
das Manko der hohen Spannung bleibt).
Wegen dieser gravierenden Nachteile wird der Synchronmotor in der Amateur-
Astronomie heutzutage nicht mehr eingesetzt.
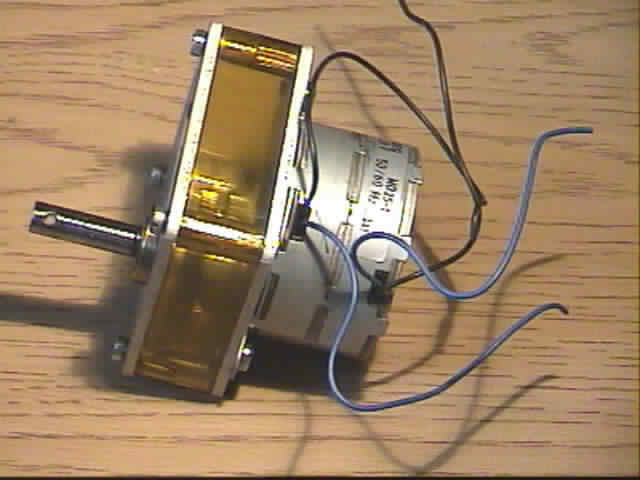
Dieser Synchronmotor stammt aus einem Heizungsmischer und ist schon
alleine wegen dem Untersetzungsgetriebe interessant. Er hat vier Anschlüsse,
da er für den Mischer rechts- und linkherum drehen können mußte.
Er wäre evtl. für unsere Zwecke einsetzbar, da die Betriebsspannung
nur 24Volt beträgt, er wurde also über einen Trafo betrieben.
Es bleibt aber das Manko der schlechten Regelbarkeit.
Der Servomotor.
Bei modernen, schnellen GOTO- Systemen werden Servomotoren eingesetzt. Diese ermöglichen schnelle Teleskopbewegungen und eine trotzdem präzise Nachführung. Bei diesen Motoren handelt es sich um hochwertige Gleichstrommotoren die durch eine Regel- Elektronik in einer Regelschleife betrieben werden. Dies bedeutet, daß sich am Motor ein Sensor befindet, der die Drehzahl des Motors sehr präzise mißt. Diese Ist- Drehzahl wird nun von der Elektronik mit der Soll- Drehzahl verglichen und eine eventuelle Abweichung wird vom Motor sofort ausgeregelt. Dieses Antriebsverfahren stellt zur Zeit den Stand der Technik dar und bleibt deshalb für Eigenbauten ein paar wenigen Spezialisten vorbehalten.
Hierzu habe ich kein Bild reingestellt, da der Motor selber ja nur
ein Gleichstrommotor ist und er nur durch den elektronischen Regelkreis
zum Servomotor wird. Für schnelle Servosysteme werden natürlich
auch spezielle Gleichstrommotore eingesetzt, die deshalb auch diese Bezeichnung
tragen.
Ein paar Beispiele für elektronische Steuerungen
:
Einfache Steuerung für Gleichstrommotor:
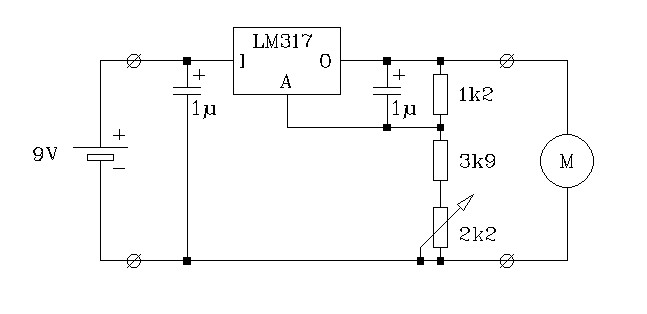
Der LM317 ist im Prinzip ein Festspannungsregler für 1,2V Ausgangsspannung.
Wenn man nun in gezeigter Weise am Ausgang einen Spannungsteiler anbaut,
dann kann man somit die Ausgangsspannung auf den gewünschten Wert
einstellen (min. 1,2V). In dieser Schaltung habe ich den Widerstand vom
Ausgang zum Adjust-Eingang auf 1,2 kOhm dimensioniert, somit ergibt sich
eine Ausgangsspannung von 1V pro 1 kOhm (gerechnet über den gesamten
Spannungsteiler). Das Poti läßt sich von 0 Ohm bis 2,2 kOhm
verstellen. Dazu kommt der Festwiderstand von 3,9 kOhm. Daraus resultiert
ein einstellbarer Spannungsbereich von min. 1,2V + 3,9V = 5,1V,
bis max. 1,2V + 3,9V + 2,2V = 7,3V. Zu erwähnen wäre noch,
daß die maximale Verlustleistung des Regler-IC's nicht überschritten
werden darf, bei etwas größeren Motoren sollte auch eine Kühlfläche
für das IC vorgesehen werden.
Für die visuelle Beobachtung mit kleineren Geräten (z.B.
Russentonne) reicht ein Gleichstrom-Antrieb mit einer solchen Steuerung
vollkommen aus.
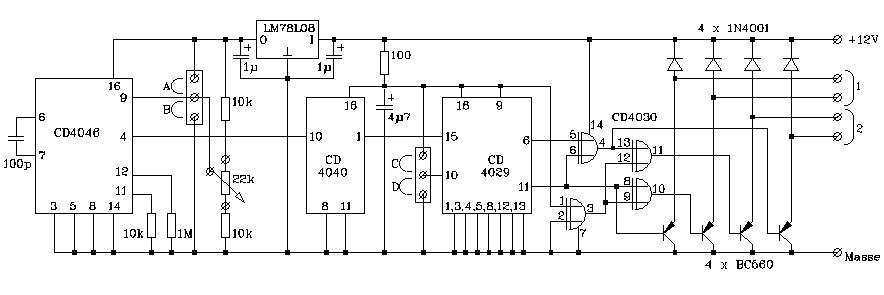
Schrittmotor-Ansteuerung über den Printerport des PC's:
Mit dieser Schaltung kann ein Schrittmotor direkt über zwei
Bits eines PC-Printerports gesteuert werden. Der obere Eingang bestimmt
die Drehrichtung und ein Impuls am unteren Eingang löst einen Schritt
aus. Der Motor muß ein unipolar-Typ sein, d.h. mit Mittelanzapfungen
der Wicklungen welche auf +12V gelegt werden müssen. Mit dieser Schaltung
kann man nicht nur eine PC-Teleskopsteuerung realisieren, sondern auch
andere Spielereinen durchführen (ich habe mit mehreren dieser Schaltungen
schonmal einen Plotter sowie einen kleinen Roboter betrieben).
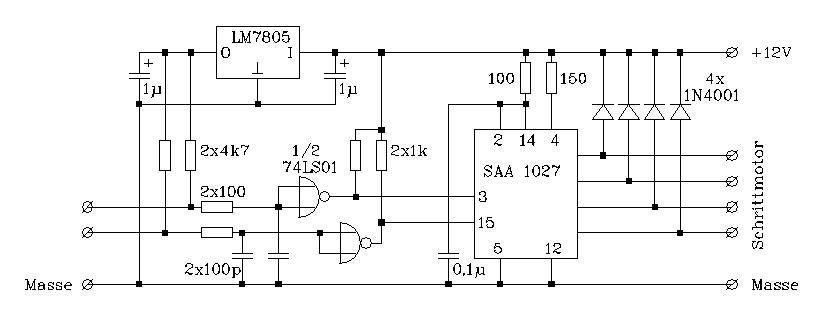
Einfacher Ra-Antrieb mit Schrittmotor:
Bei dieser Schaltung wurde bewußt auf ein spezielles IC für
die Ansteuerung des Motors verzichtet. Genau diese Schaltung ist auf dem
Beispielbild für die Schrittmotore zu sehen (oben, 2. Bild der Seite).
Sie betreibt den runden, flachen Schrittmotor aus einem Conrad-Restposten.
Der Motor muß ebenfalls ein unipolar-Typ sein, d.h. mit Mittelanzapfungen
der Wicklungen welche auf +12V gelegt werden müssen. Die mit "A" und
"B" bezeichneten Brücken können durch Taster realisiert werden
und ermöglichen eine schnellere und langsamere Schrittfrequenz. Mit
den durch "C" und "D" bezeichneten Brücken wird die Drehrichtung festgelegt
(evtl. Nord / Süd -Umschaltung), dabei muß eine der beiden Verbindungen
geschlossen sein. Der Wert des Kondensators ganz links (hier 100p) muß
natürlich an die nötige Taktrate angepasst werden. Bei Poti-Mittelstellung
soll die Nachführgeschwindigkeit den richtigen Wert haben. Der Kondensator
sollte ein Wickeltyp sein (z.B. MKC, MKT, ...), damit er einen kleinen
Temperaturkoeffizienten hat (wir wollen ja kein Thermometer bauen :-)
Jetzt wird's mechanisch: Das Untersetzungsgetriebe:
Da ich aus der Elektro-Ecke komme erheben die folgenden Ausführungen keinen Anspruch auf Vollständigkeit und letzte Weisheit. Trotzdem möchte ich das, was mir dazu so einfällt hier weitergeben. Der Absatz wird aber wohl etwas kürzer ausfallen :-)
Wie oben im Kapittel "Der ungeregelte Gleichstrommotor" schon angesprochen
wurde, haben die dem Amateur zugänglichen Elektromotore alle eine
zu hohe Drehgeschwindigkeit. Diese muß also durch ein mechanisches
Getriebe erheblich untersetzt werden um auf die erforderliche Drehung von
360° auf etwa 24 Stunden zu kommen (Ra-Achse). Die Anforderungen an
ein solches Untersetzungsgetriebe hängen wie so Vieles von dem ab,
was man mit Fernrohr und Montierung anstellen möchte.
Schneckenrad und Schnecke.
In fast allen käuflichen Montierungen arbeiten zumindest in der
Ra-Achse ein Schneckenrad mit Schnecke als letzte Untersetzungsstufe. Der
Vorteil einer solchen Untersetzung ist einmal die Selbsthemmung und darüber
hinaus lassen sich so sehr präzise Antriebe realisieren. Für
Montierungen zur Astrofotografie mit langen Brennweiten ist eine Präzision
erforderlich, die deutlich über der von normalen Maschinenbau-Teilen
liegt, was auch die nicht unerheblichen Preise für solche Komponenten
erklärt. Ein Eigenbau einer solchen Montierung kommt deshalb wohl
nur für den ambitionierten Selbstbauer in Frage und ist vom Kosten-Gesichtspunkt
her zumindest fraglich. Wer jedoch das Glück hat, ein Schneckengetriebe
oder die passenden Komponenten preiswert bekommen zu können (Flohmarkt,
Schrottplatz oder Surplus-Händler) der könnte einen Eigenbau
in Betracht ziehen. Man sollte sich aber im Klaren darüber sein, daß
Teile vom Flohmarkt wohl nicht die Präzision von speziell für
Fernrohrmontierungen gefertigten erreichen werden.
Tangentialarm.
Für die Deklinations-Einstellung, nicht nur von Eigenbau-Montierungen,
wird gerne der Tangentialarm-Antrieb eingesetzt. Bei diesen Montierungen
kann die Dec.-Achse über einen Ausleger mit einem Gewinde in einem
begrezten Bereich gedreht werden. Für die grobe Voreinstellung ist
vorher eine Klemmung zwischen Tangentialarm und Achse zu lösen und
die Tangential-Verstellung sollte dabei etwa auf Mitte des Verstellbereichs
stehen. Es ist also nur eine Feinjustage über einige Grad möglich.
Der Reibrad-Antrieb (Friktionsantrieb).
Für den Eigenbau von kleineren Montierungen, besonders für die visuelle Beobachtung, eignet sich der Reibrad-Antrieb. Die nötigen Teile kann man sich oftmals mit "Haushaltsmitteln" selber herstellen oder im Baumarkt bekommen. Auf meiner Seite zur Russentonnen-Montierung auf dieser Homepage findet man ein Beispiel für ein solches Projekt. Aber auch zum Nachführen eines größeren Teleskops ist diese Technik mit Einschränkungen geeignet. Die meisten motorisierten Dobson-Teleskope sowie Nachführ-Plattformen arbeiten mit diesem Prinzip. Ein großer Vorteil eines solchen Antriebs ist die spielfreie Kraftübertragung. Dies ist vor Allem bei den letzten Untersetzungs-Stufen wichtig, da es dort lange dauern würde, ein mögliches Spiel zu durchlaufen. Man kombiniert daher normalerweise ein Zahnrad-Getriebe mit Friktions-Untersetzungen in der oder den letzten Stufe/n.
Tip:
Die runde Scheibe für meine Russentonnen-Montierung habe ich,
mit einem Nagel als Achse, auf der einen Seite einer Workmate-Werkbank
drehbar befestigt. Auf die andere Seite habe ich eine Handbohrmaschine
mit Schleifteller festgespannt. Durch drehen der Scheibe und beistellen
des Vorschubs an der Workmate kann man die Holzscheibe prima rund und auf
Maß schleifen.